移动地图系统(MMS)具有多种定位技术,这些技术通常分别用于各种越野和道路应用。正如Richard Rybka在他的文章中指出的那样,定位将把我们带到哪里?他讨论了如何将GPS、间隔测量单元(imu)和距离测量仪器(DMIs)集成到一个系统中,以实现快速数据收集。Topcon定位系统MMS系统的开发最初是由互联网地图数据提供商推动的,但设备原始设备制造商的应用和潜在利益正变得越来越明显。
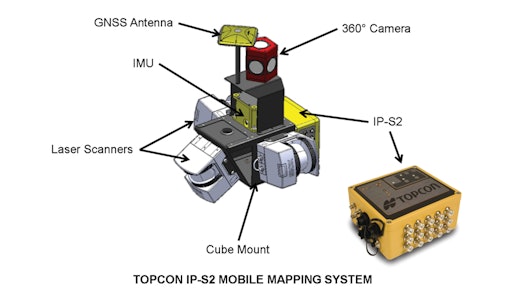
当车辆沿着一条路线行驶时,MMS记录事件和来自三个定位设备和信息传感器的数据输出。在IP-S2系统中,这些事件以15纳秒的非常精确的速率被计时到GNSS信号中。
由于数据是由彩信收集的,它被存储在与系统相连的计算机硬盘上。IP-S2系统使用笔记本电脑或带有多个盒式硬盘驱动器的专用计算机,具体取决于使用哪种型号。当绘制任务完成后,通常将数据传输到办公环境中的处理计算机。
TPS的处理软件geclean是整合所有定位设备和传感器信息的关键。第一个处理任务解压记录的数据并将其转换为所需的格式。第二项任务使用先进的算法来处理来自GNSS、IMU和DMI的数据,以创建准确的车辆轨迹和姿态。为了提高精度,来自移动系统的GNSS数据可以与本地接收机或参考站网络上记录的卫星数据进行后处理。
一旦飞行器轨迹得到解决,就会启动其他geclean任务,将数据转换为可用的格式。来自六个镜头相机区域的单个图像拼接在一起,以创建360°球形图像。一旦形成球形图像集,它们将与飞行器轨迹对齐。激光扫描仪生成的点云也与车辆轨迹对齐。云中每个地理空间点的颜色值都可以从图像中得到。
处理完成后,TPS的空间工厂软件可用于查看、分析、测量和提取有关特征的信息。独立的激光雷达点云可以导出用于其他第三方软件应用程序。
IP-S2系统和软件通过将大量彩色点云融合为360°图像,创建了一类新的地理空间数据。用户可以从球面图像的中心旋转、平移和缩放。特征的地理空间位置和测量是通过抓拍到精确的点云。其结果是一个完全沉浸式的物体和周围环境的3D视图。