ACEINNA在YouTube视频频道上宣布了一个新的视频-“关于新的ACEINNA OpenIMU包的所有内容”。
这段简短的视频提供了ACEINNA新的OpenIMU包的快速和简单的概述。
ACEINNA的OpenIMU解决方案由三个关键部分组成。
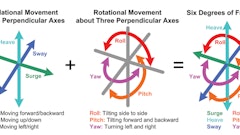
首先是由三个高精度加速度计、三个高精度陀螺仪和一个强大的ARM Coretex组成的惯性测量单元系列。CAN Second是一个开源工具链和IMU编程的参考代码。它包含了从基本的下载和调试到松耦合GPS/INS的参考实现的所有内容。第三是一个完整的开发站点和工具,包括图表、图形甚至算法模拟。
“OpenIMU提供了先进的、易于部署的定位和导航算法解决方案,其时间和成本仅为传统方法的一小部分。OpenIMU将开源软件和低成本硬件相结合,能够快速开发无人机、机器人和自主应用的先进解决方案,”ACEINNA的CTO Mike Horton解释道。“OpenIMU是同类软件中的第一个,专业支持,开源的GPS/ gnss辅助惯性导航软件堆栈,用于低成本的精确导航应用。”
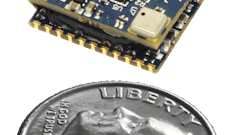
OpenIMU开发硬件开发工具包包括JTAG-pod、精密安装夹具、EVB和一个OpenIMU300模块。OpenIMU模块具有ACEINNA的5度/小时,9轴陀螺仪,加速度计和磁强计传感器套件,内置180MHz ARM Coretex浮点CPU。IMU采用小尺寸(24x37x9.5 mm),易于集成的模块,操作从2.7-5.5V DC。
这个可免费下载的堆栈包括:
- 基于freertos的数据采集和采样引擎
- 性能调优,实时,导航级GPS/INS卡尔曼滤波器库
- 基于Visual Studio Code的免费IDE/编译器工具链
- JTAG调试用于IMU上加载的调试代码
- 数据记录,绘图,艾伦方差图和地图,
- 丰富的文档
- 具有先进传感器误差模型的鲁棒仿真环境