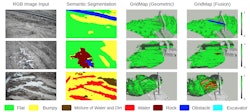
研究人员从百度研究机器人和自驾实验室(、)和马里兰大学学院公园(UMD格式)已经开发出一种实时映射方法自主导航的挖掘机在复杂地形地形Traversability映射(TTM)命名。使用TTM,自主挖掘机可以浏览非结构化户外环境组成的深坑,陡峭的山坡,岩石堆,和其他复杂的地形特征。这是第一个复杂地形处理方法为重型挖掘开发的机器。
研究小组展示技术MINExpo国际2021。
 MINExpo 2021摊位
百度研究机器人和自驾实验室
MINExpo 2021摊位
百度研究机器人和自驾实验室
机器人系统,如自主挖掘机的发展建设和采矿行业越来越多的趋势,因为这些公司在全球范围内正面临劳动力短缺,面对日益增长的需求对熟练重型机械操作符。全球挖掘机市场规模为441.2亿美元,2018年预计将增长到2026年的631.4亿美元。
挖掘机广泛运行在非结构化的和危险的环境中,难以预测和有潜在危险的条件。挖掘机由挖掘和倾销的操作,提高,一直和塌方的危险。这些复杂的环境缺乏车道标记,障碍往往是不均匀的和随机的,使他们不太便于通航。确保在这样的环境下,确保操作人员的安全是至关重要的自主挖掘机能够识别不同的地形特征和预测安全区域导航。
启用自动挖掘机来处理复杂的地形,研究人员开发了一个基于高效学习几何方法从RGB图像中提取地形特征和三维点云,纳入全球地图规划和导航。方法使用挖掘机的物理特性,包括最大上升程度和机器规格,确定可反驳的地区,适应不断变化的环境和地形信息的实时更新。此外,这些研究人员准备一本小说自治挖掘机地形数据集,由RGB图像和激光雷达点云从建筑工地七个不同类别根据适航性。这种整合与规划和控制模块的映射方法,不断提高自主挖掘机导航系统。实验表明,在使用TTM,挖掘机可以浏览非结构化环境中具有更高的成功率相比现有规划方案。
新TTM技术之前的另一个创新百度、和今年6月联合UMD格式——一个自治挖掘机系统(AES)能够进行材料加载任务24小时在没有任何人工干预的情况下,同时提供性能几乎相当于一位有经验的操作员。研究人员描述他们的方法论在6月30日发表的一份研究报告,2021年科学机器人。
 百度研究机器人和自驾实验室
百度研究机器人和自驾实验室







![夏洛特如2 e [20]](https://img.oemoffhighway.com/files/base/acbm/ooh/image/2022/01/Charlotte_Ebus_2e_20_.61f3068676a88.png?auto=format%2Ccompress&fit=crop&h=135&q=70&rect=0%2C231%2C1920%2C1080&w=240)